

Trabalho de Conclusão de Disciplina APC II
Prof. Kesede R Julio
Descrição:
Nessa segunda fase de nosso projeto, iremos inserir uma automação para o volante, onde o carrinho será guiado utilizando o acelerômetro de um celular com Android.
Integrantes:




Objetivo:
Melhorar o projeto de APC I de um “Carrinho de rolimã” com automações utilizando-se de uma placa Arduino.
Utilizaremos um motor de passo para realizar o movimento do volante no carrinho.
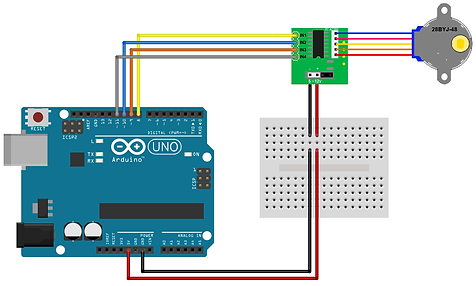

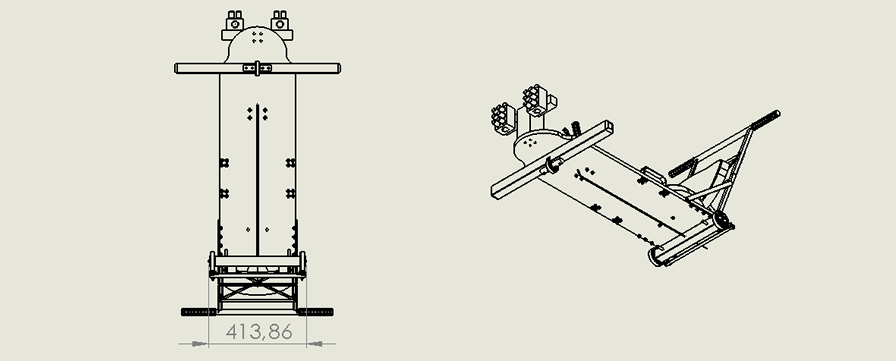
Imagens do Protótipo:


Código comentado:
Código Arduino de APC II:
Obs.: sem a interação via Bluetooth inplementada.
#include <Servo.h>
Servo servo;
int acelero;
void setup(){
Serial3.begin(9600);
Serial3.setTimeout(10);
servo.attach(9);
//acelero = 0;
}
void loop() {
if (Serial3.available()>=2){
acelero=Serial3.read();
if (acelero>-95 && acelero<95){
acelero=map(acelero, -90, 95, 0, 180 );
servo.write(acelero);
}
}
}
}
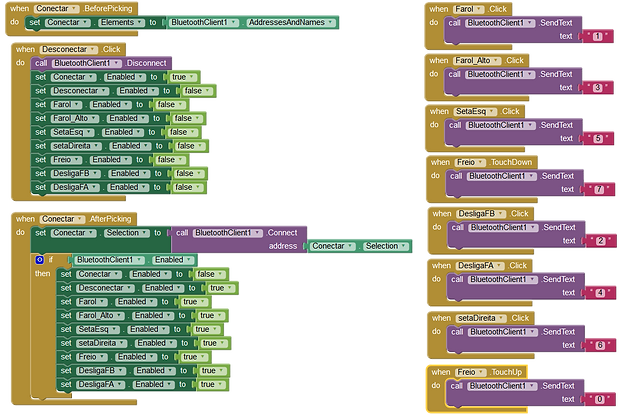
Código Android com o MIT App Inventor 2
Modelo de tela inicial do Android com o MIT App Inventor 2
Link para download: Click aqui ou copie e cole em seu celular Android o link: ai2.appinventor.mit.edu/?galleryId=5006701450231808

Vídeos:
Na realização da montagem do “Carrinho de rolimã” iremos gravar vídeos e postar para que seja possível visualizar como foi o andamento e as dificuldades enfrentadas em nosso projeto.
Cronograma:

Planejamento do projeto em grupo
2Hrs
02/09/2015
Definição dos Materiais
1Hrs
07/09/2015
Desenvolvimento do Código
10Hrs
14/09/2015
Implementação do código
5Hrs
05/10/2015
Execução do projeto
8Hrs
13/10/2015
Testes no Carrinho
3Hrs
17/10/2015